Tingguang Li (李珽光)
tgli0809 AT gmail.com
I am a Principal Engineer and Head of Robotics at Samsung Research China. I am leading a group of extraordinary talented researchers and engineers working on VLA for robotic manipulation and Whole Body Control for humanoid robots. Previously, I was a Senior Research Scientist at Tencent Robotics X Lab. I received the Ph.D. degree at The Chinese University of Hong Kong, supervised by Professor Max Qing-Hu Meng, and the BEng. from Nanjing University. In 2019, I was a Visiting Student Researcher at Artificial Intelligence Laboratory (SAIL), Stanford University, under the supervision of Professor Jeannette Bohg.
!!!We are hiring self-motivated interns. If you are interested in VLA and WBC, please feel free to contact me!
Google Scholar | CV | Github | Linkedin

News
- [02/2026] One paper accepted by TRO.
- [05/2025] We released our latest multi-modal perception and planning model: blog (Chinese)
- [09/2024] Our paper is published in Nature Machine Intelligent as the Cover Article!
- [09/2023] Two papers accepted in ICRA 2024.
Journal Papers
|
|||
 |
|
||
|
|||
|
|||
|
|||
|
|||
Conference Papers
 |
|
 |
|
 |
|
||
 |
|
||
 |
|
||
 |
|
||
 |
|
||
 |
|
||
 |
|
||
 |
|
||
 |
|
Research Projects
 |
|
Talks
- 栩栩如生的机器狗:腾讯Robotics X用预训练模型和强化学习提升机器狗控制.
- 将门AI红人榜专访:“爱折腾”与“慢慢来”
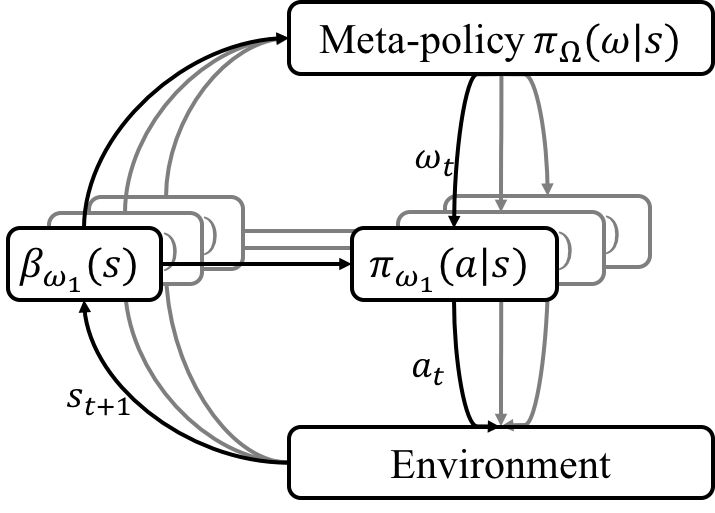
- 将门Talk:一种基于层次强化学习的机械手鲁棒操作
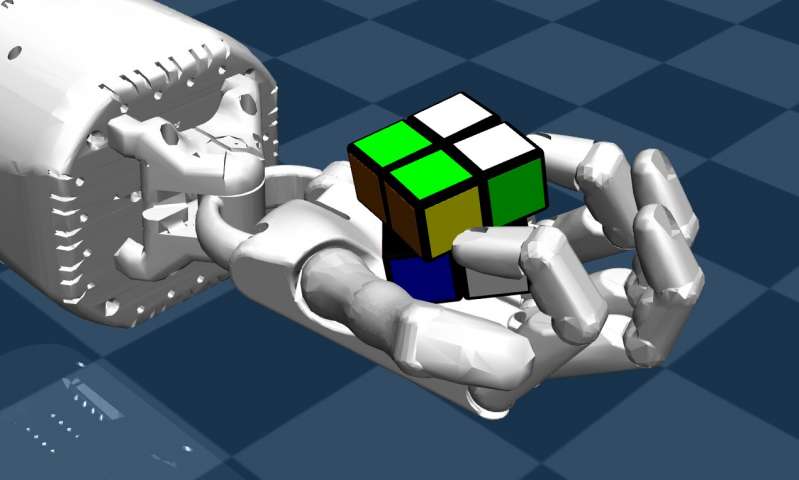
- One paper Solving a Rubik's Cube with a Dexterous Hand is reported by TechXplore.
Honors
- Tencent Annual Patent Grand Prize (First Inventor) (2023)
- Tencent Technology Breakthrough Award (2020, 2022, 2023)
- Outstanding Tutor Award of The Chinese University of Hong Kong (2020)
- Outstanding Students Award of The Chinese University of Hong Kong (2018)
- IROS 2018 travel award (2018)
- ICRA 2018 student travel award (2018)
- Best Conference Paper Award Finalist of ROBIO (2017)
- The 5th place winner among 93 teams at the worldwide ICRA 2017 DJI RoboMaster Manipulation Challenge (2017)
- Hong Kong Ph.D. Fellowship (2016 - 2020)
- Outstanding Undergraduate Award of Nanjing University (2016)
- National Undergraduate Scholarship (2015)
Teaching
- Teaching Assistant: CUHK ELEG4407, Intelligent Interactive Robot Practice, 2019
- Teaching Assistant: CUHK ELEG 2201, Digital Circuits and Systems, 2018
- Teaching Assistant: CUHK ELEG 2202, Fundamentals of Electric Circuits, 2018
- Teaching Assistant: CUHK BMEG 4130, Biomedical Modeling, 2016