Tingguang Li (李珽光)
tgli0809 AT gmail.com
I am currently a Principal Engineer at Samsung Electronics. Previously, I was a Senior Research Scientist at Tencent Robotics X Lab. I received the Ph.D. degree at The Chinese University of Hong Kong, supervised by Professor Max Qing-Hu Meng, and the BEng. from Nanjing University. In 2019, I was a Visiting Student Researcher at Artificial Intelligence Laboratory (SAIL), Stanford University, under the supervision of Professor Jeannette Bohg.
My research interests lie in applying Reinforcement Learning on Robotics, including dexterous manipulation, quadrapdal control, imitation learning, sim-to-real transfer. Recently, I am working on projects of multimodal models, specifically, Vison Language Action models (VLA). We hope to endow robots with the intelligence to see (Vision), listen (language) and react (Action) autonomously.
!!!We are hiring self-motivated interns. If you are working on VLA, deep reinforcement learning, robotics, and interested in large models, please feel free to contact me.
Google Scholar | CV | Github | Linkedin

News
- [05/2025] We released our latest multi-modal perception and planning model: blog (Chinese)
- [09/2024] Our paper is published in Nature Machine Intelligent as the Cover Article!
- [09/2023] Two papers accepted in ICRA 2024.
Journal Papers
 |
|
||
|
|||
|
|||
|
|||
|
|||
Conference Papers
 |
|
 |
|
 |
|
||
 |
|
||
 |
|
||
 |
|
||
 |
|
||
 |
|
||
 |
|
||
 |
|
||
 |
|
Research Projects
 |
|
Talks
- 栩栩如生的机器狗:腾讯Robotics X用预训练模型和强化学习提升机器狗控制.
- 将门AI红人榜专访:“爱折腾”与“慢慢来”
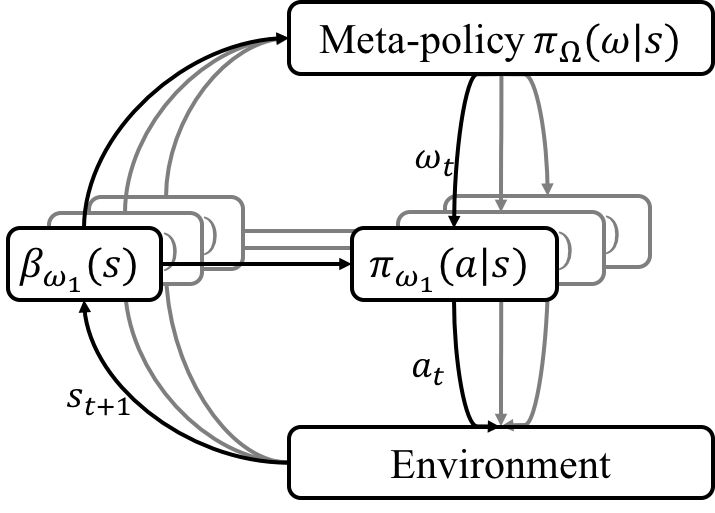
- 将门Talk:一种基于层次强化学习的机械手鲁棒操作
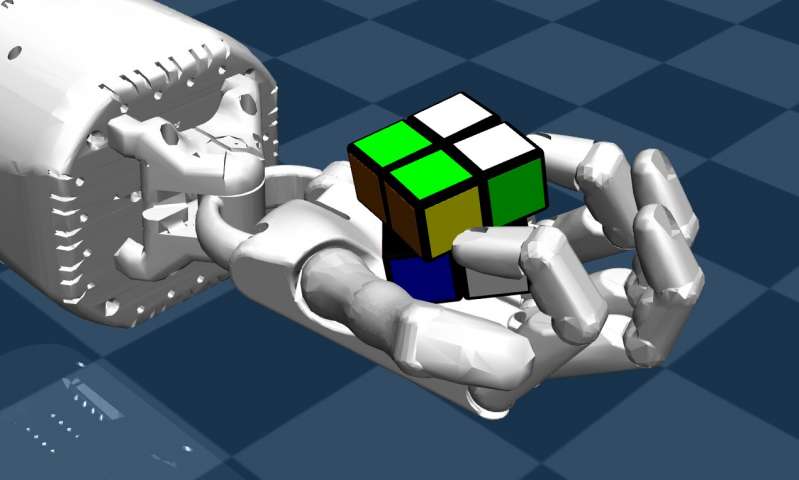
- One paper Solving a Rubik's Cube with a Dexterous Hand is reported by TechXplore.
Honors
- Tencent Annual Patent Grand Prize (First Inventor) (2023)
- Tencent Technology Breakthrough Award (2020, 2022, 2023)
- Outstanding Tutor Award of The Chinese University of Hong Kong (2020)
- Outstanding Students Award of The Chinese University of Hong Kong (2018)
- IROS 2018 travel award (2018)
- ICRA 2018 student travel award (2018)
- Best Conference Paper Award Finalist of ROBIO (2017)
- The 5th place winner among 93 teams at the worldwide ICRA 2017 DJI RoboMaster Manipulation Challenge (2017)
- Hong Kong Ph.D. Fellowship (2016 - 2020)
- Outstanding Undergraduate Award of Nanjing University (2016)
- National Undergraduate Scholarship (2015)
Teaching
- Teaching Assistant: CUHK ELEG4407, Intelligent Interactive Robot Practice, 2019
- Teaching Assistant: CUHK ELEG 2201, Digital Circuits and Systems, 2018
- Teaching Assistant: CUHK ELEG 2202, Fundamentals of Electric Circuits, 2018
- Teaching Assistant: CUHK BMEG 4130, Biomedical Modeling, 2016